In Section 14-1 we saw how an amplifier can be operated in a differential mode to produce an output voltage proportional to the difference between two input signals (see Figure 14-5). Differential operation is a common requirement in instrumentation systems and other signal-processing applications where high accuracy is important. The circuit of Figure 14-5 has certain limitations in these applications, including the fact that the signal sources see different input impedances. Also, the circuit does not generally have good common-mode rejection, an important consideration in instrumentation systems, where long signal lines and high electrical noise environments are common. Figure 14-38 shows an improved configuration for producing an output proportional to the difference between two inputs. Notice that the circuit is basically the difference amplifier discussed earlier, with the addition of two input stages.
Each input signal is connected directly to the noninverting terminal of an operational amplifier, so each signal source sees a very large input resistance. This circuit arrangement is so commonly used that it is called an instrumentation amplifier and is commercially availublc by that name in single-package units. These devices use closely matched, high-quality amplifiers and have very large common-mode rejection ratios.

In our analysis of the instrumentation amplifier, we will refer to Figure 14-39, which shows current and voltage relations in the circuit. We begin by noting that the usual assumption of ideal amplifiers allows us to equate vi and v; at each input amplifier (vi – Vi- = 0), with the result that input voltages VI and V2 appear across adjustable resistor RA in Figure 14-39. For analysis purposes, let us assume that VI > V2′ Then the current i through RA is
Since no current flows into either amplifier input terminal, the current i must also flow in each resistor R connected on opposite sides of RA• Therefore, the voltage drop across each of those resistors is Voltages Vol and V02 are the input voltages to the differential stage studied in Section 14-1. Since the external resistors connected to that stage are all equal to R, we recall (from equations 14-13 and 14-14, with J\ ::; I) that

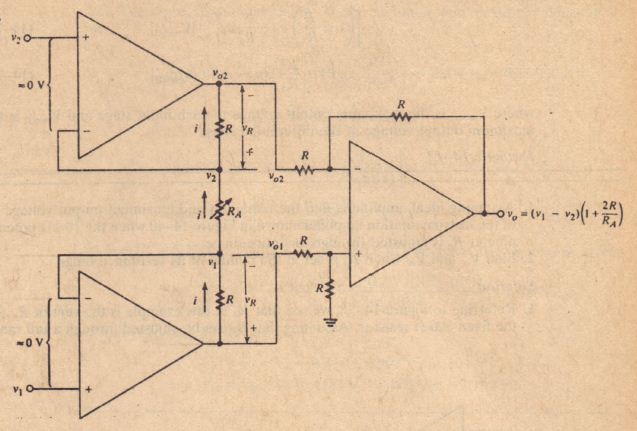
Equation 14-74 shows that the output of the instrumentation amplifier is directly proportional to the difference voltage (vJ – V2), as requireck The overall closedloop gain is clearly (1 + 2RIRA). RA is made adjustable so that gain can be easily adjusted for calibration purposes. Note that the gain is inversely proportional to RA.
To ensure proper operation of the instrumentation amplifier, all three of the following inequalities must be satisfied at all times where VIIII«(I) is the maximum output voltage of each input stage and V nuu(2) is the maximum output voltage of the differential stage.
1. Assuming ideal amplifiers; find the minimum and maximum output voltage V” of the instrumentation amplifier shown in Figure 14-40 when the lO-kH potentiometer Uf• is adjusted through its entire range.
2. Find V,.f and V,,] when RI’ is set in the middle of its resistance range.
Solution
1. Referring 10 Figure 14-~H.we see that R” in this example is the sum of R, and the fixed 5Ut.J-Uresistor. Assuming that R; can he adjusted through a full range
The maximum output voltages for all three operational amplifiers in an instrumentation amplifier arc ::!:: 15 V. For a particular application, it is known that input signal VI may vary from 0 V to 0.8 V and input signal v! from () V to 13 V. Assuming that R = 2 kD., design the circuit for maximum possible dosed-loop gain.
Solution“. Since the closed-loop gain is inversely proportional to R,I’ we must Ilnd the minimum value of RII that simultaneously satisfies inequalities 14-75 through 14-77. We must consider the worst-case condition for each inequality, that is, the combination of values for VI and V2 that makes the left side of each inequality as large as possible. Thus. for inequality 14-75, we must satisfy both of the following:

Summarizing, we require that all the following inequalities he satisfied: R,., > 112.68nR,., > 173.3 0, R”, > 189.71 0, R,., > 106.67nR”, > 379.560, and R,., > 225.35 O. Obviously, the only way that all inequalities can be satisfied is for R,., to be larger than the largest of the computed limits: R,., > 379.56 O. Choosing the closest standard 5% resistor value that is larger than 379.56 0, we let R,., = 390 O. This choice gives us the maximum permissible closed-loop gain, with a small margin for error:



